← Isha JainME 210 · Stanford
Hardware · Software
Curl'y Fries
a fully autonomous curling robot, built in a 2.5 week sprint
Jan - March 2026
Fusion 3603D printingArduinoC++State machinesElectronics
For Stanford's ME 210 competition, our team had 2.5 weeks to build a fully autonomous curling robot. I designed the omniwheel drivetrain and wrote the state machine that let the robot navigate the field, aim, and launch pucks.
demo run
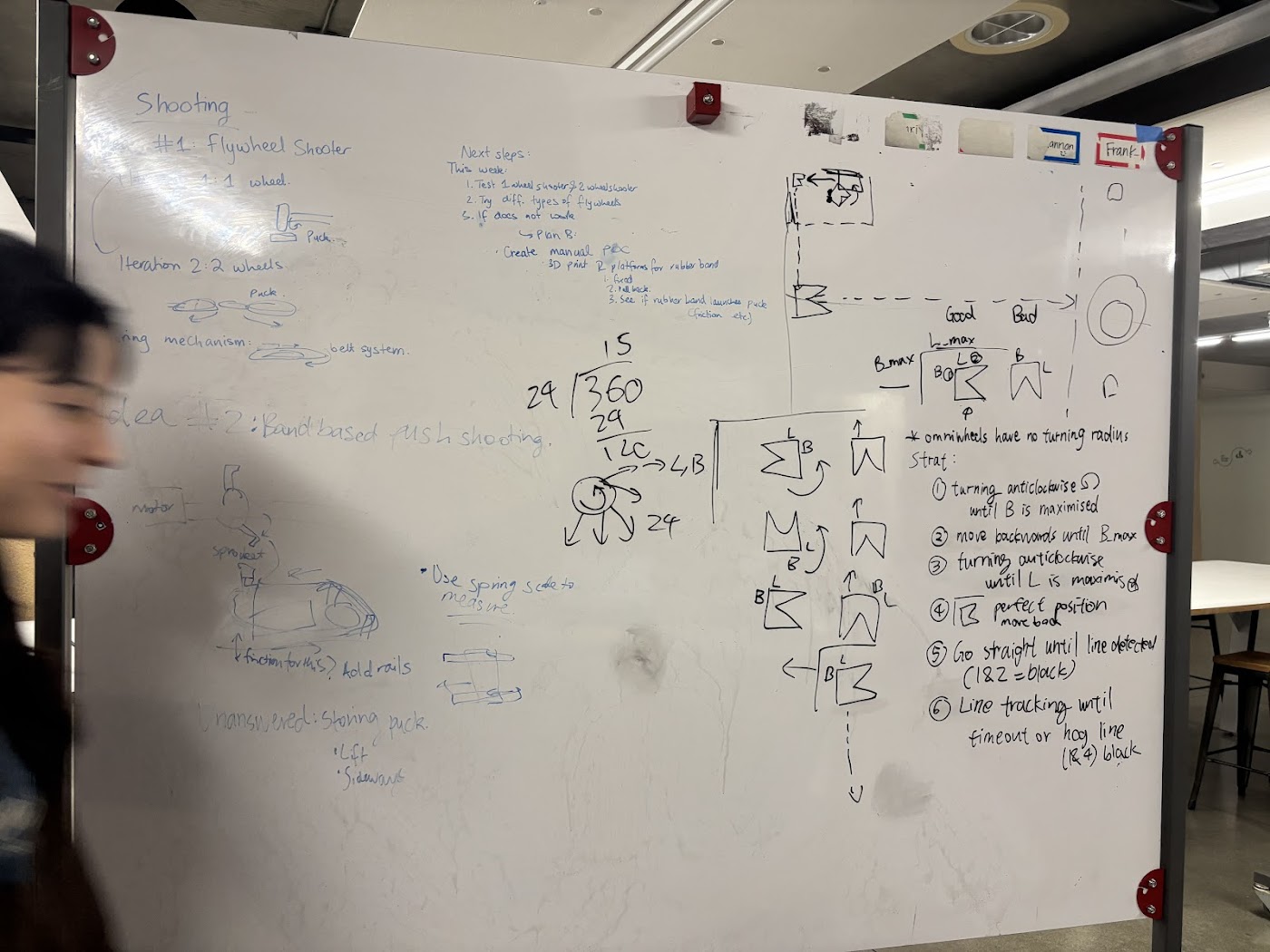
brainstorming
final robot